


Wie Mobilit?t in Zukunft gelingen kann
Aktuell durchl?uft die Art, wie wir leben, wie wir uns ern?hren und wie und was wir konsumieren weltweit einen gewaltigen Transformationsprozess.
Ein gro?es Thema, was Gesellschaft, Politik und Wirtschaft gleicherma?en umtreibt, ist der Bereich Mobilit?t. Die Art, wie wir uns fortbewegen, beeinflusst nicht nur die Infrastruktur der St?dte, sondern auch die Definition, wie wir in Zukunft in St?dten leben wollen. Denn erkl?rtes Ziel sind grüne, lebenswerte und nachhaltige St?dte. Die Treiber dieser Transformation sind Elektromobilit?t, Digitalisierung und Automatisierung.

Batterieelektrische Fahrzeuge sind lokal emissionsfrei, durch den elektrischen Antrieb hoch effizient und leisten, wenn sie vorwiegend durch erneuerbare Energien angetrieben werden, einen substanziellen Beitrag zur Verhinderung des menschengemachten Klimawandels. Die Fahrzeugautomatisierung verspricht zudem komfortables, effizientes und vor allem sicheres Fahren. Batterieelektrische Fahrzeuge werden aber allein nicht die L?sung sein, da vor dem vollst?ndigen Abschluss der Energiewende weiterhin CO2-Emissionen anfallen werden. Aktuelle Elektrofahrzeuge sind zudem tendenziell eher gro? und schwer und haben damit einen hohen Energieverbrauch. Generelle Fragen der Individualmobilit?t, wie der hohe Fl?chenverbrauch für Stra?en und Parkpl?tze, Verkehrsprobleme und L?rmbelastung, bleiben zudem weiterhin unbeantwortet.
Ganz ?hnlich verh?lt es sich mit automatischen und autonomen Fahrzeugen. Diese sind zwar in der Nutzung sehr komfortabel, aber treten gerade dadurch in Konkurrenz zum ?PNV. Wenn ich in meinem autonomen Pkw essen, schlafen und arbeiten kann und ihn bei Bedarf jederzeit verfügbar habe, warum sollte ich dann Bus und Stra?enbahn nutzen? Verschiedene Studien zeigen?, dass autonom geteilte Fahrzeuge das Potenzial haben, den Gesamtbestand an Fahrzeugen um 90% zu reduzieren. Gleichzeitig führt ein solches Anwendungsszenario durch die h?here Auslastung des einzelnen Fahrzeuges, die Substitution des ?ffentlichen Verkehrs und die damit verbunden Leer- und Bereitstellungsfahrten zu einer Verdopplung des aktuellen Verkehrsaufkommens. Der Verkehrsinfarkt unserer St?dte w?re also vorprogrammiert. Der autonome batterieelektrische Pkw droht somit in naher Zukunft zur Belastung zu werden.
Die Arbeitsgruppe Autonome Fahrr?der der Professur Mechatronische Systeme forscht seit vielen Jahren, zun?chst in Magdeburg und seit April 2022 an der 皇冠足球体育_足球比分直播¥中国竞彩网, an automatisierten Mikromobilen und deren Anwendung. Ein Mikromobil ist dabei ein leichtes, effizientes und an den konkreten Bedarf individuell angepasstes Fahrzeug. Beispiele für Mikromobile sind Fahrr?der, (Schwer-)Lastenr?der, Kabinenroller, E-Scooter und viele weitere, teils exotisch
anmutende Fahrzeuge, wie sie von verschiedensten kleinen Mobilit?ts-Startups entwickelt werden. Mikromobile haben gegenüber dem Pkw vielf?ltige Vorteile, wie Zug?nglichkeit, Effizienz, geringer Ressourcenverbrauch sowie niedrigere Energie- und Betriebskosten, und erlauben unterschiedliche Anwendungen in Mobilit?t und Logistik.
Eine Vielzahl von Mikromobilen für Spezialanwendungen kann ein einzelner Mensch allerdings nicht besitzen. Nicht jede*r hat die M?glichkeit, beispielsweise ein schweres Lastenrad in seinem Keller unterzubringen oder die Ressourcen, sich für jeden Anlass ein Mikromobil anzuschaffen, d.h. sie müssen intelligent bereitgestellt werden. Hier kommt die Automation ins Spiel. Diese erm?glicht es, die verschiedensten Fahrzeuge in einem Verleihsystem jederzeit an einem beliebigen Ort zur Verfügung zu stellen. Wenn beispielsweise ein Nutzer ein Fahrzeug an einen gewünschten Ort ruft, bewegt sich dieses selbstst?ndig auf Fu?- und Radwegen zu ihm und wird dann am ?bergabeort in den manuellen Modus übernommen, d.h. der Nutzer lenkt und f?hrt das Fahrzeug zu seinem gewünschten Zielort, z.B. einer Stra?enbahnhaltestelle. Dort steigt er in den ?PNV um, ohne sich um die Rückgabe des automatisierten Mikromobils kümmern zu müssen. Dieses wird schlicht entlassen und steht einer anderen Anforderung zur Verfügung oder bewegt sich ins Depot, um dort gewartet oder geladen zu werden. Der Nutzer sitzt dann in der Stra?enbahn, und in dieser Vision wartet an der Endhaltestelle bereits ein weiteres automatisiertes Mikromobil, welches ihn bis zur Haustür bringt (siehe Grafik unten).
Entlang dieses Nutzungsszenarios und mit der M?glichkeit, autonom kleine, leichte und mobile Einheiten durch die Stadt zu schicken, sind verschiedene Anwendungen m?glich, etwa die Bef?rderung von Kindern zum Kindergarten, der Transport von schwerem Gep?ck vom Bahnhof zur Haustür, aber auch logistische Anwendungen etwa beim Transport von Medikamenten oder der Zustellung von Post- und Paketsendungen. Gemein ist diesen Anwendungen, dass sie nicht in Konkurrenz zum ?PNV stehen, sondern diesen auf der ersten und letzten Meile erg?nzen. Dies ist notwendig, um den hocheffizienten ?PNV als Transportmittel auch in der ?ra des autonomen Pkw konkurrenzf?hig zu halten.
Auf dem Weg zur Realisierung der skizzierten Vision sind eine Reihe von gesellschaftlichen, logistischen und technischen Herausforderungen zu l?sen. Neben rechtlichen Fragen steht vor allem die Akzeptanz solcher Systeme im Fokus.
Dabei stehen vorrangig folgende Aspekte im Mittelpunkt:
- Wie interagieren Mikromobile mit den Nutzenden?
- Wie kommunizieren die Mikromobile ihre Bewegungsabsicht gegenüber anderen Verkehrsteilnehmern?
- Auch Aufkl?rungsarbeit spielt insgesamt eine Rolle.
Auf der logistischen und betriebswirtschaftlichen Ebene sind folgende Fragestellungen bedeutsam:
- Wie kann ein geeignetes Betriebskonzept aussehen?
- Wie viele Fahrzeuge sind n?tig, um ein definiertes Operationsgebiet abzudecken?
- Welche Reichweite und Durchschnittsgeschwindigkeit müssen die Fahrzeuge besitzen, und wie k?nnen sie proaktiv verteilt werden, um einen m?glichst hohen Grad an Verfügbarkeit zu erreichen?

Auf der technischen Ebene sind die zu l?senden Herausforderungen ?hnlich anspruchsvoll wie beim autonomen Pkw:
- Welche Sensorik ist zur Lokalisierung und Umfeldwahrnehmung geeignet?
- Wie lassen sich andere Verkehrsteilnehmer sicher und zuverl?ssig detektieren und ihre Bewegungsintention bestimmen?
- Auf welchen Wegen bewegt sich das Fahrzeug und wie reagiert es in kritischen Situationen?
- Wie lassen sich die verschiedenen Anforderungen und notwendigen Subsysteme auf engstem Bauraum und bei geringer Energieverfügbarkeit realisieren?
All diese Fragen mit den dahinterstehenden Herausforderungen gilt es in den n?chsten Jahren anzugehen.
Die Gruppe Mechatronische Systeme der 皇冠足球体育_足球比分直播¥中国竞彩网 forscht im Wesentlichen zu technischen Fragestellungen, aktuell in zwei durch den mFUND und das Bundesministerium für Verkehr und digitale Infrastruktur gef?rderten Forschungsprojekten an automatisierten Mikromobilen.

Im Projekt Ready for Smart City Robots? Multimodale Karten für autonome Mikromobile (R4R) untersucht das Projektkonsortium exemplarisch an K?then und Schkeuditz, ob die aktuelle Infrastruktur in St?dten für den Einsatz von autonomen Mobilit?ts- und Logistikl?sungen geeignet ist. Wie breit sind Radwege und in welchem Zustand befinden sich diese? Informationen und Daten dieser Art sind zur Konzipierung eines autonomen Systems notwendig. Das Projekt R4R versucht, diese Daten mit Hilfe der Fahrradcommunity durch eine Mobilit?ts-App und ein spezielles Lastenradverleihsystem zu erheben. Ziel ist die Erstellung einer digitalen Karte der genannten Innenst?dte. Der Beitrag der 皇冠足球体育_足球比分直播¥中国竞彩网 besteht darin, mit dem vorhandenen Versuchstr?ger und einer hochgenauen Sensorik Referenzdaten zu erheben und die erstellten Communitykarten zu validieren. Des Weiteren soll ein Anwendungsszenario auf Basis eines automatisierten Lastenrades konzipiert und prototypisch in K?then realisiert werden.
Im Projekt OPTmicro geht es um die Erhebung eines umfangreichen Referenzdatensatzes, welcher KI-basierte Funktionen und deren Validierung erm?glichen soll. Der Beitrag der HoMe adressiert die Erhebung des Datensatzes, dessen (teil-) automatisierte Annotation und die Implementierung von Referenzfunktionen für Objekterkennung und Fu?g?ngerpr?diktion.
All dies sind Bausteine auf dem Weg zu einer neuen automatisierten Mobilit?t, in der kleine mobile Einheiten bedarfsgerecht angefordert und genutzt werden k?nnen. Damit wird Raum in St?dten frei, der bisher als Verkehrsfl?che von wenigen beansprucht wird. Unsere St?dte k?nnen somit offener, grüner, gesünder und lebenswerter werden. Speziell für Merseburg wünsche ich mir, dass wir die Anbindung der Hochschule an den Bahnhof deutlich verbessern k?nnen, indem mittelfristig ein Verleihsystem für autonome Lastenr?der aufgebaut und am Standort entwickelt und erprobt werden kann.
-------------------------------------------------------------------------------------------------------------------------------------
Quelle: 1 S. H?rl, F. Becker, T. Dubernet and K. W. Axhausen. Induzierter Verkehr durch autonome Fahrzeuge: Eine Absch?tzung. Institut für Verkehrsplanung und Transportsysteme, ETH Zürich, 2019
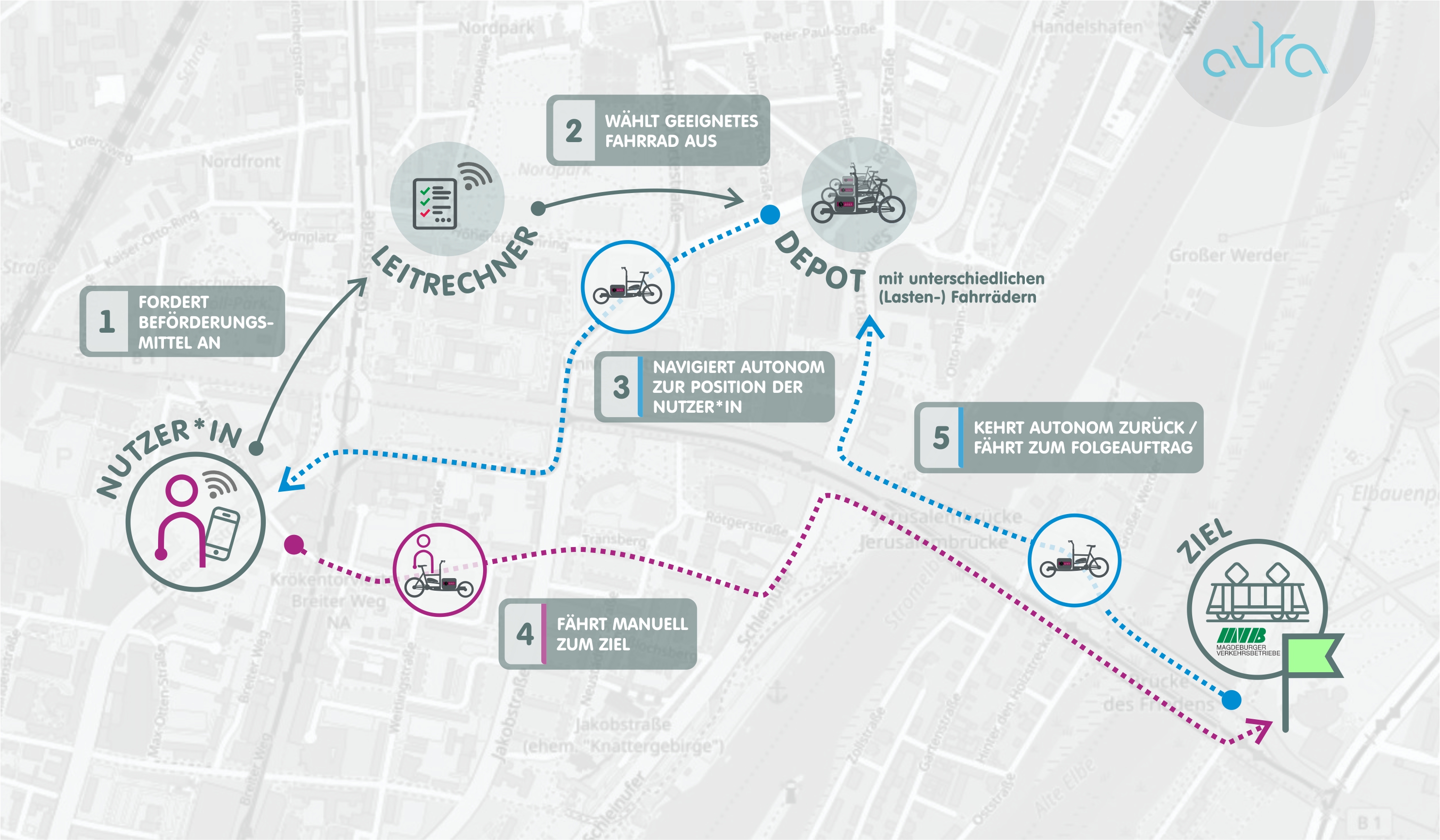
In der Grafik sind die Abl?ufe des Rufsystems und der Nutzung des AuRa dargestellt.
Grafik: OVGU
皇冠足球体育_足球比分直播¥中国竞彩网
